Ziel des Forschungsprojektes IMUcompact war die Entwicklung einer Messeinheit zur präzisen Positionsbestimmung von autonomen Drohnensystemen. Die Inertial Measurement Unit (kurz: IMU) des Systems basiert im Wesentlichen auf drei Gyroskopachsen und drei Beschleunigungssensoren, die eine zentimetergenaue Positionsbestimmung für Navigation und Geländevermessung ohne GPS-Signal ermöglichen. Kompakte Gyroskope mit geringer Auflösung befinden sich heutzutage in allen Smartphones und Smart Watches, um zum Beispiel die Orientierung des Bildschirms oder der Fotokamera sicherzustellen. Diese sogenannten MEMS[1]-Gyroskope sind zwar auch klein und leicht, für den Einsatz in Drohnen allerdings anfälliger gegenüber Umwelteinflüssen wie Temperatur, Feuchtigkeit und elektromagnetischen Feldern. IMU-Systeme mit höherer Auflösung waren bisher aufgrund ihrer Größe und Kosten nicht für die Industrie oder Wirtschaft rentabel.
Das am Fraunhofer-Institut für Zuverlässigkeit und Mikrointegration entwickelte interferometrische faseroptische Miniaturgyroskop (IFOG) ermöglicht eine höhere Detailgenauigkeit und kann aufgrund seiner Kompaktheit und einem geringen Gewicht mit unterschiedlichsten Trägerdrohnen kombiniert werden. Da diese Form des Gyroskops keine beweglichen Teile beinhaltet und elektromagnetisch unempfindlich ist, eignet sie sich weitaus besser für den Einsatz in unbemannten Drohnen als herkömmliche MEMS-Alternativen.
Hohe Miniaturisierung dank innovativer Montagemethode
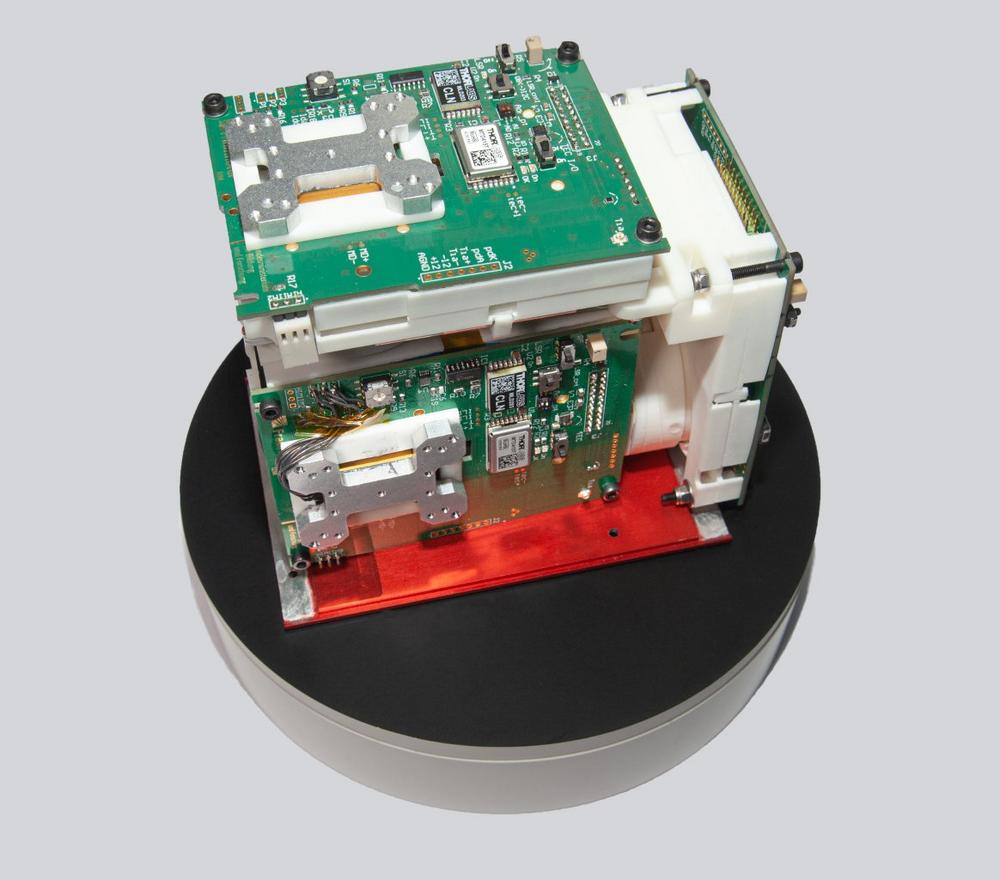
Mit einer neu entwickelten Montagemethode können die elektronischen und optischen Komponenten der IMU so angeordnet werden, dass ein hoher Grad an Miniaturisierung ohne Einbußen bei der Genauigkeit erreicht wird. Herkömmliche IMUs verfügen nur über eine Auflösung im Bereich von 25-30 cm. Das am Fraunhofer IZM entwickelte Gyroskop erlaubt jetzt eine absolute Genauigkeit von unter 10 cm. Die spezielle Anordnung der Messkomponenten auf einer 3D-gedruckten optischen Bank ermöglicht zudem eine hohe mechanische Festigkeit für industrielle Anwendungen bei sehr geringem Gewicht. Darüber hinaus wurde eine anwendungsspezifische Leiterplatte entwickelt, die aufgrund ihres Designs sehr robust und gleichzeitig kompakt ist.
Photogrammetrische Messungen aus der Luft
Eine der ersten Praxisanwendungen der neuen IMU stellt die Photogrammetrie mit UAVs dar. Photogrammetrie ist die Vermessung und Bestimmung von physischen Gegenständen mithilfe der Kombination von 2D-Bildern und 3D-Messverfahren wie beispielsweise LIDAR. In diesem Fall darf das Gewicht der IMU nicht mehr als ein Kilogramm betragen, das gesamte Messsystem inklusive IMU, LIDAR, Kameras, Datenlogger PC und der Stromversorgung via Akkus muss unter fünf Kilogramm wiegen. Mögliche Einsatzzwecke von drohnenbasierter Photogrammetrie sind die automatisierte Vermessung von Fabrikgebäuden, die technische Überwachung von Offshore Windkraftanlagen oder automatisierte Bestandsaufnahmen in der Land- und Viehwirtschaft. Auch zur Schadensbestimmung in Katastrophengebieten kann die drohnengestützte Photogrammetrie einen wichtigen Beitrag leisten, besonders wenn große Gebiete von unerwarteten Umweltereignissen betroffen sind. Anbieter von Online-Kartendiensten nutzen ebenfalls photogrammetrische Verfahren für die Erstellung von digitalem 3D-Kartenmaterial, wofür aber häufig noch kostenintensiv auf Flugzeuge oder Gyrocopter mit entsprechender Messtechnik zurückgegriffen werden muss.
Starke Partnerschaft aus Forschung und Wirtschaft
„Als Expert*innen in der Aufbau- und der Verbindungstechnik optischer Fasern konnte das Fraunhofer IZM gemeinsam mit Projektpartner*innen einen Demonstrator entwickeln, bei dem die IMU mit einem GPS-System, sowie einem leistungsfähigen integrierten Schaltkreis zu einer vollständigen, integrierten Lösung kombiniert wurde. Dieser Prototyp soll in einem weiteren Schritt nun optimiert werden, um die zivile Nutzung autonomer Drohnensysteme weiter voranzutreiben“, fassen die Projektleiterin Dr. Alethea Vanessa Zamora Gómez und der Entwickler Christian Janeczka das Projektende zufrieden zusammen. Denkbar ist auch der Einsatz in anderen Trägersystemen wie Schiffen, der Luft- und Raumfahrt, autonomen Fahrzeugen, bis hin zu KI-basierten Logistiknetzwerken, die einen höheren Grad an Automatisierung ermöglichen.
Projektpartner*innen für IMUcompact waren neben dem Fraunhofer IZM die IGI – Ingenieur-Gesellschaft für Interfaces mbH, die IntraNav GmbH, sowie die MILAN Geoservice GmbH als assoziierter Partner. Das Projekt wurde für eine Laufzeit von fünf Jahren bis März 2023 unter dem Förderkennzeichen 13N14758 vom Bundesministerium für Bildung und Forschung gefördert.
[1] MEMS-Gyroskop steht für mikroelektromechanisches System-Gyroskop und bezeichnet herkömmliche Messysteme, die auf einer vibrierenden Siliziumstruktur basieren.
Text: Yannic Walter
Das Fraunhofer IZM ist weltweit führend bei der Entwicklung und Zuverlässigkeitsbewertung von Technologien für die Aufbau- und Verbindungstechnik von zukünftiger Elektronik. Hierdurch entstehen Eigenschaften, die bislang eher untypisch für Mikroelektronik sind: zum Beispiel wird sie dehn- oder waschbar, hochtemperaturbeständig oder extrem formangepasst. Die Forschenden des Fraunhofer IZM setzen dabei ebenso Maßstäbe für die Umweltverträglichkeit von Elektronik.
Fraunhofer-Institut für Zuverlässigkeit und Mikrointegration IZM
Gustav-Meyer-Allee 25
13355 Berlin
Telefon: +49 (30) 46403-100
Telefax: +49 (30) 46403-111
http://www.izm.fraunhofer.de
Presseansprechpartner
Telefon: +49 (30) 46403-279
Fax: +49 (30) 46403-650
E-Mail: georg.weigelt@izm.fraunhofer.de
E-Mail: alethea.vanessa.zamora.gomez@izm.fraunhofer.de
![]()