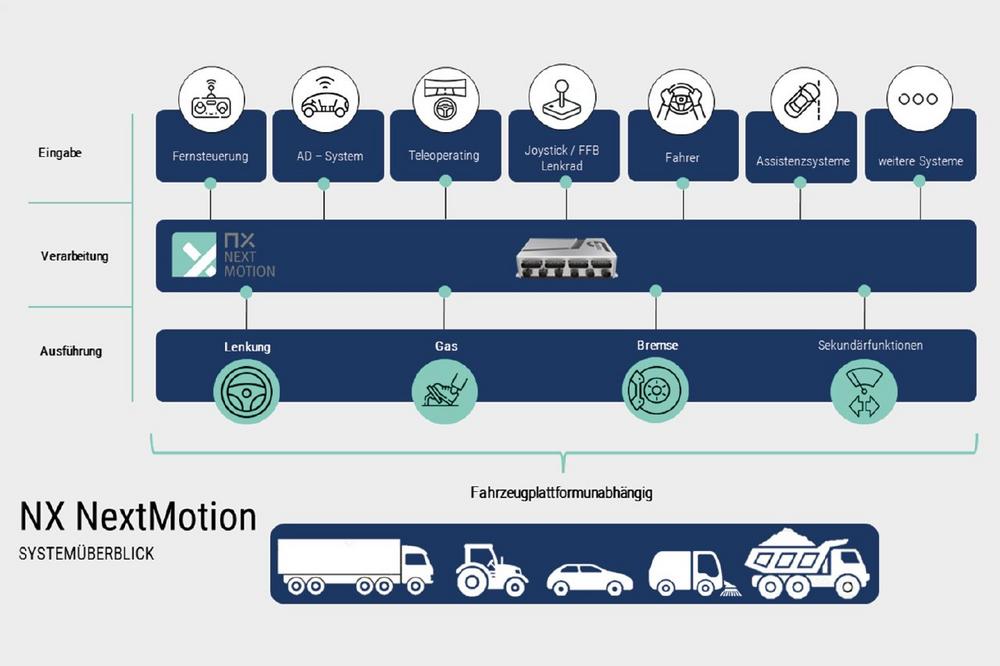
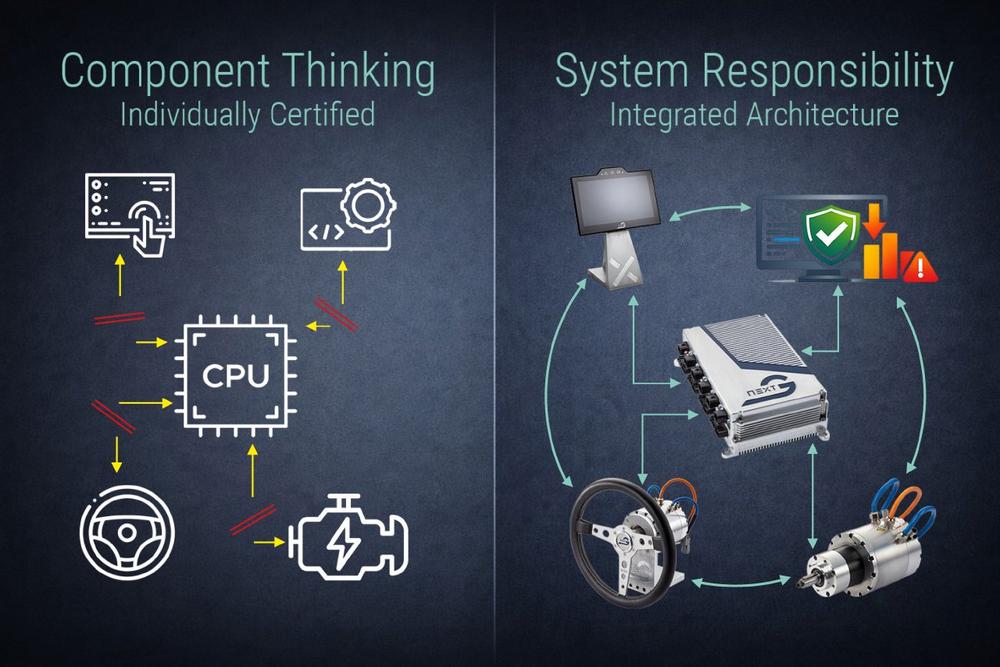
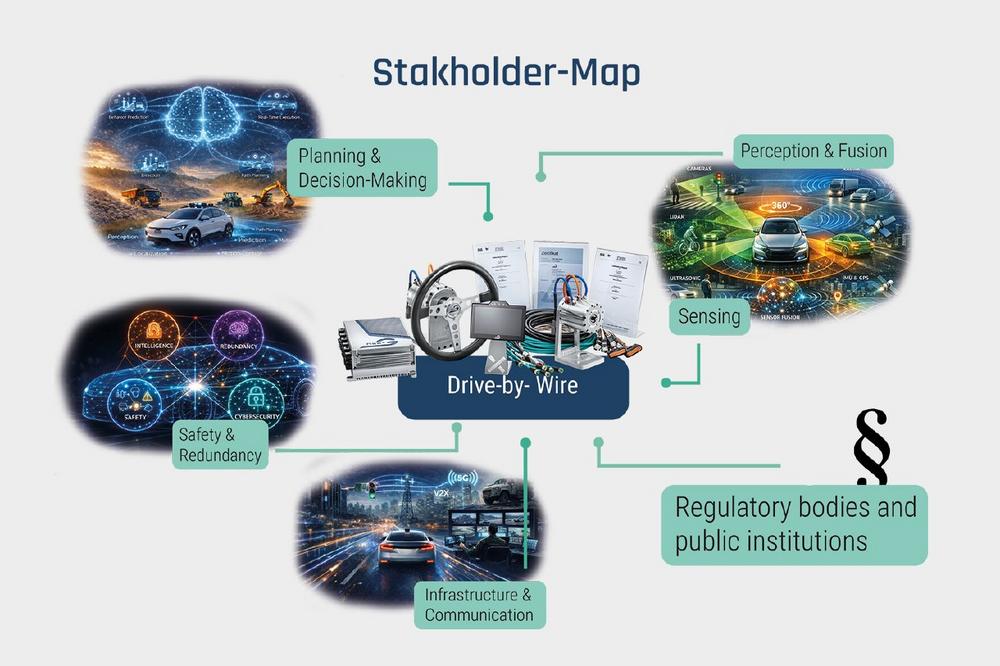
Drive-by-wire technology is considered well-established. Yet as automation increases, it becomes clear that the crucial question is not which components are used—but how they work together as a complete system. In the discussion surrounding electronic vehicle control, it is often implicitly assumed that a functioning overall system can be assembled from high-quality individual components. Steer-by-wire […]
continue reading