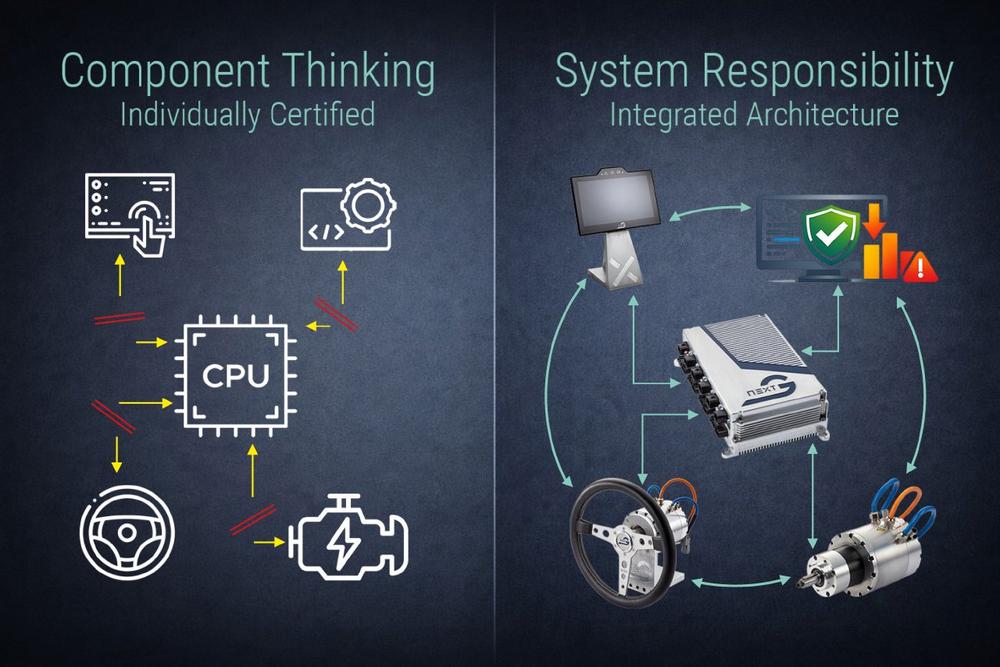
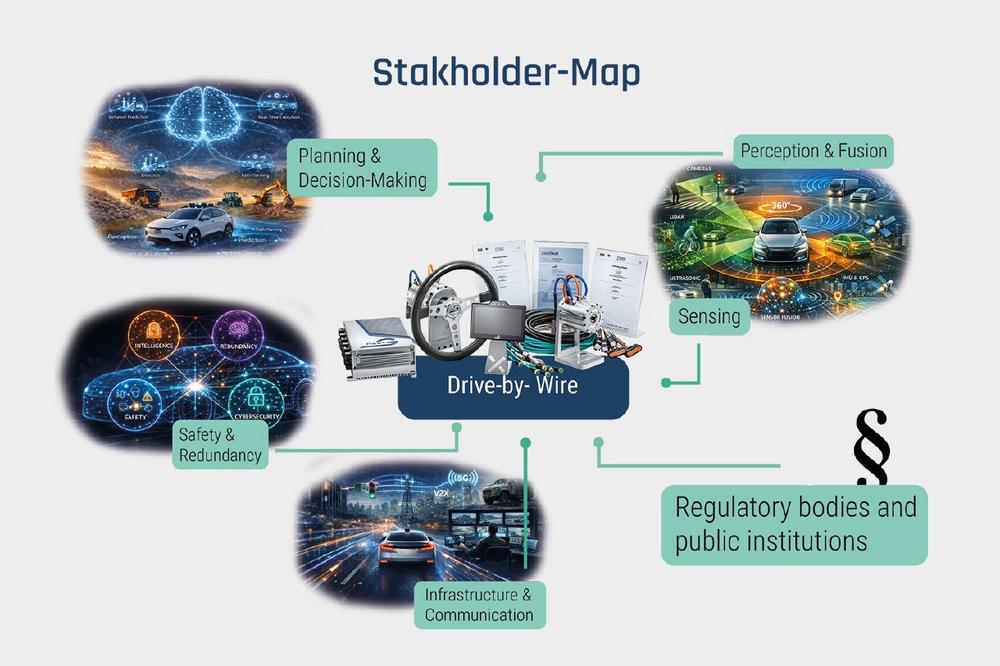
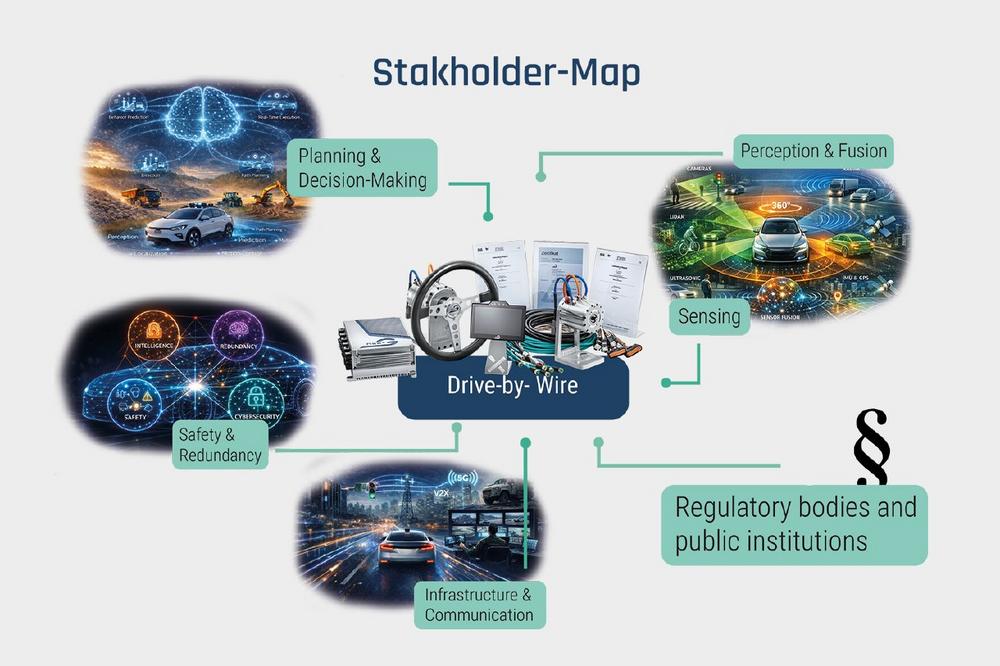
Drive-by-wire is considered established – but when it comes to vehicles that are supposed to drive autonomously or be controlled remotely, it becomes clear that it is not the individual components that are decisive, but rather the architecture of the vehicle control system. Autonomous driving is usually discussed in terms of sensor technology, AI, and […]
continue reading