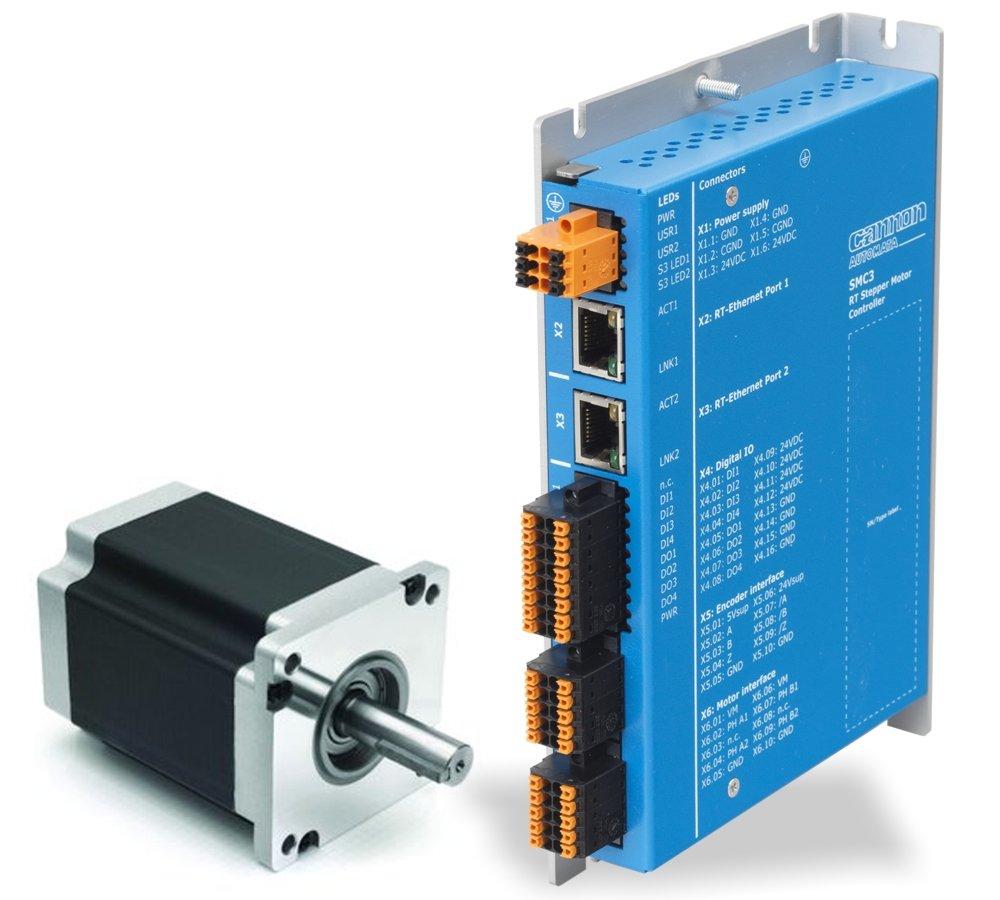
Der SMC3 Stepper-Controller mit EtherCAT® oder Sercos® Interface unterstützt die standardisierten Antriebsprofile der beiden Protokolle. Alle für den Betrieb an CNC- oder Roboter-Steuerungen benötigten Funktionen sind vollständig implementiert. Dazu gehören u.a. zyklische Geschwindigkeits- oder Positionsvorgabe, Positionierfunktionen und verschiedene Homing-Modes. Der Einsatz in anspruchsvollen Motion-Anwendungen mit interpolierenden Achsen (z.B. 3-Achs und 5-Achs Bearbeitungsprozesse) ist so problemlos […]
continue reading