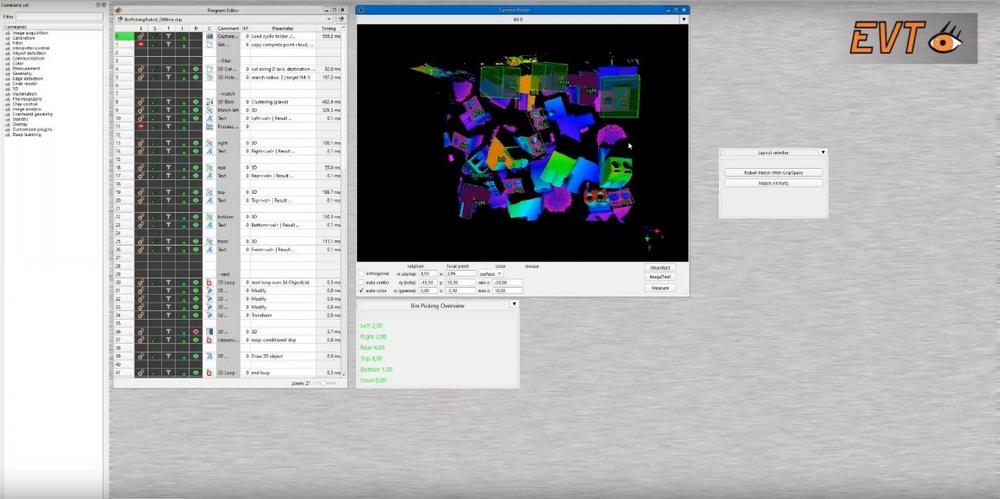
Das Palettieren oder Depalettieren basiert immer darauf, dass Objekte (z. B. Kartons, Beutel etc.) sicher und schnell erkannt werden und die ermittelten Greifdaten dann an den Roboter weitergegeben werden. Die Basis für das korrekte Greifen ist die Hand-Eye-Kalibrierung, damit der Roboter an der Position greift, wo die Kamera das Objekt sieht. Damit das Erkennen zuverlässig […]
continue reading